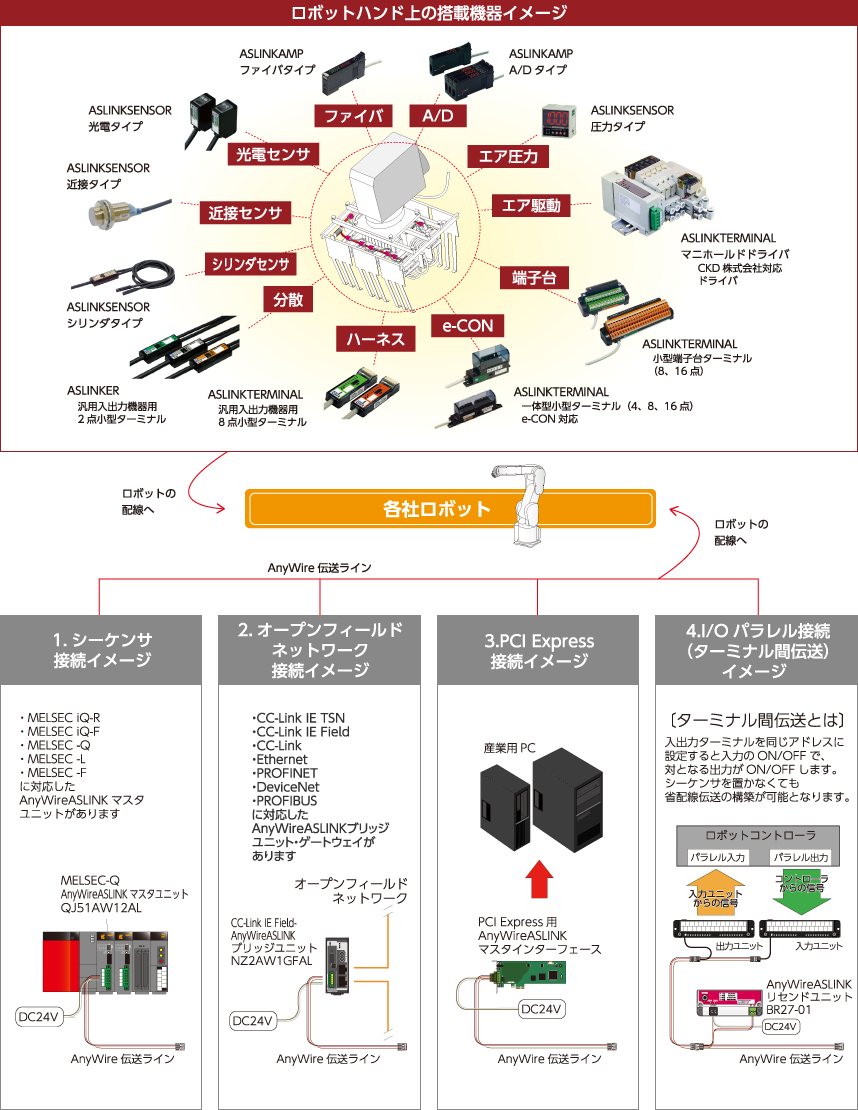
システム構成図
ロボットハンド上のI/Oは4芯ケーブルで接続、制御が可能です。
コントローラとの接続は、4種類の方法から選択していただけます。
- シーケンサ(MELSEC iQ-R、iQ-F、Q、L、F)
- オープンフィールドネットワーク(CC-Link IE TSN、CC-Link IE Field、CC-Link、Ethernet、PROFINET、DeviceNet、PROFIBUS)
- PCI Express
- I/Oパラレル接続(MELFA D Typeコントローラ、各社パラレル入出力付ロボットコントローラ)